021-59580007、17701875118
021-59580007、17701875118 13524995263@163.com
13524995263@163.com


• 最多可进行4轴运动控制。利用电子凸轮功能和插补功能,实现装置的高速、高精度化。
• 含单轴位置控制在内,可使用EtherCAT轻松连接最多8轴的伺服系统。


机器自动化控制器
• 最多可进行4轴运动控制。利用电子凸轮功能和插补功能,实现装置的高速、高精度化。
• 含单轴位置控制在内,可使用EtherCAT轻松连接最多8轴的伺服系统。
• 需一定精度的加工及按照最短线路进行高速定位的传送等可使用直线插补、圆弧插补控制轨迹
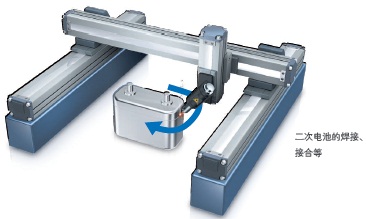
•配备电子凸轮功能。可使间歇动作的装置进行连续动作,从而实现装置的高速化
•可实现凸轮动作的电子化,从而实现机械凸轮难以对应的多品种生产

补偿数据传送的延迟时间差,使伺服电机间的控制同步。
各轴同步,实现高精度定位。
• EtherCAT可使用1根通信电缆连接NX1P和伺服驱动器,从而减少接线工时
AC伺服系统 1S系列
• 无蓄电池可减少维护和空间
• 标配23位ABS编码器,无需原点复位
• 利用升级的回路控制,可提高追踪性和缩短整定时间
• 配备安全功能(STO)

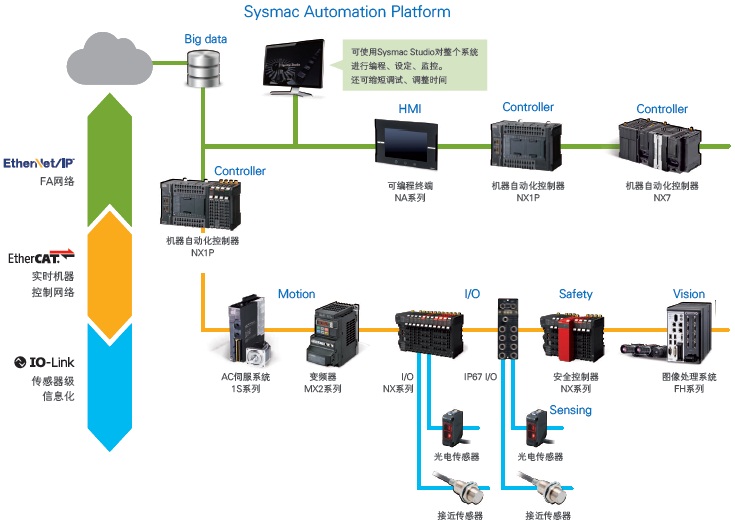
• 通过EtherCAT使用1根电缆连接输入设备、输出设备、运动设备、安全控制器、视觉系统,可监控各设备的状态,掌握设备信息。
• 通过EtherNet/IP可实现与上位PC的通信及NJ/NX系列、CJ系列与控制器之间的数据链接。
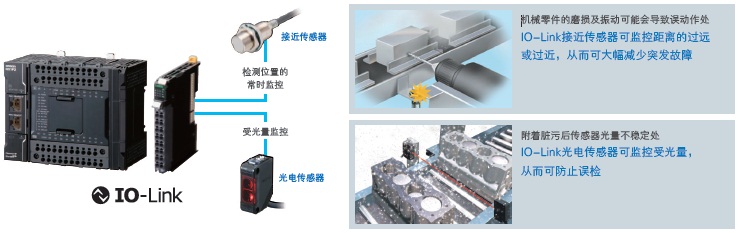
从小规模起进行预防维护。
可以加装在新的小型装置或现有设备上小规模开始实现装置状态的可视化。
NX1P 主体上最多可安装8台。

Sysmac Studio是为以NJ/NX系列CPU单元为主的,机器自动化控制器的编程、调试、维护提供一体化开发环境的软件。
• 整合运动、逻辑、安全、驱动器、图像传感器及HMI支持功能的一体化软件
• 通过适应变量的指令语,全面支持梯形图语言、ST语言与功能块编程(符合IEC61131-3标准)
• 搭载可轻松设定复杂运动控制的凸轮编辑器
• 实现逻辑与运动一体化的3D模拟、调试
• 可对每个项目、POU进行设定的32位高安全性密码功能
Sysmac 为欧姆龙株式会社在日本和其它国家用于欧姆龙工厂自动化产品的商标或注册商标。
Windows 是美国 Microsoft Corporation 在美国及其他国家的注册商标或商标。
EtherCAT® 是德国 Beckhoff Automation GmbH 的注册商标和专利技术,由该公司授权使用。
EtherNet/IPTM 是ODVA 的商标。
所引用的其他公司名称和产品名称等均为各公司的注册商标或商标。
本目录中使用的产品照片和图片中包含示意图,可能与实物有所差异。
屏幕截图的使用已获得微软的许可。